1FK7103-5AF71-1EH0
Description
2. Type Code Explanation
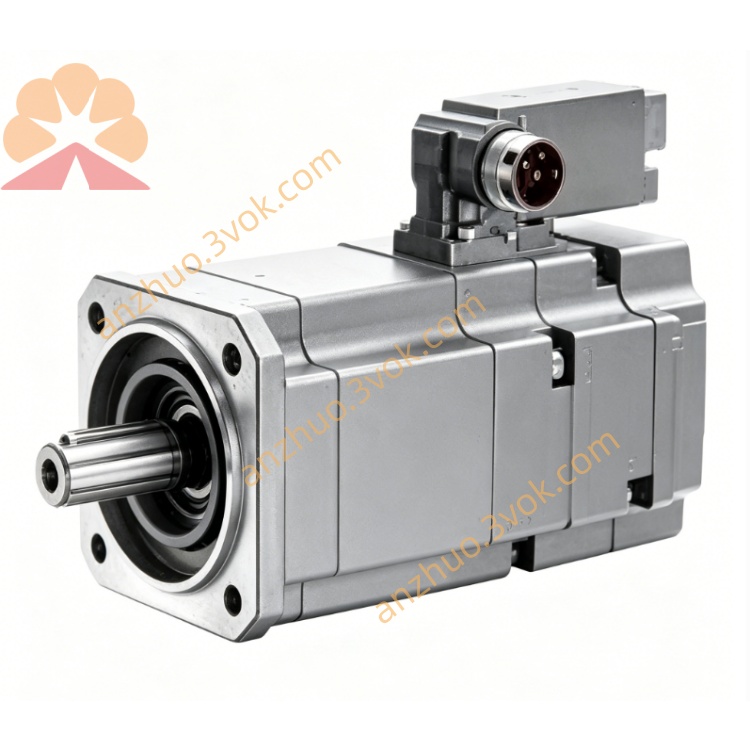
1FK7: SIMOTICS S compact servo motor series
103: Frame size 100, length 3
5AF71: Winding/voltage/speed version (400 V, 3000 rpm)
1EH0: Shaft (plain), flange (IM B5), encoder (EnDat absolute), brake (with), protection (IP64)
3. Technical Specifications
Electrical
Rated power: 4.4 kW (100 K)
Rated voltage: 3AC 400 V
Rated speed: 3000 rpm
Max speed: 5000 rpm
Rated torque: 36 Nm (100 K)
Peak torque: 72 Nm (2× overload)
Encoder: Absolute encoder, EnDat 2.2, 2048 ppr
Brake: Integrated holding brake, 24 V DC, spring‑applied
Mechanical & Environmental
Frame size: 100 mm
Mounting: IM B5 (IM V1/V3) flange
Shaft: Plain shaft, tolerance N
Protection class: IP64
Cooling: Natural convection
Insulation class: F (155 °C)
Operating temperature: 0 °C to +40 °C
Storage temperature: −20 °C to +70 °C
Weight: Approx. 12.5 kg
4. Encoder (EnDat 2.2 Absolute)
Type: Multi‑turn absolute encoder
Interface: EnDat 2.2 (no Drive‑CLiQ)
Resolution: 2048 pulses/rev
Function: Provides position, speed, and commutation signals
Absolute position: Retained after power‑off (no battery required)
Note: 10% performance reduction due to absolute encoder
5. Holding Brake
Type: Spring‑applied, electrically released
Voltage: 24 V DC (±10%)
Holding torque: Matched to motor rated torque (36 Nm)
Application: Holds vertical loads, prevents axis drop during power‑off
6. Mechanical Data
Flange: Standard IM B5, Ø200 mm
Shaft diameter: Ø28 mm, plain (no keyway)
Connector: Power/signal plug rotatable 270°
Vibration grade: R/A
7. Application
KUKA robot axes (external and standard)
Machine tool feed spindles
High‑speed handling and packaging systems
Siemens SINAMICS S110/S120 drive systems
8. Installation Instructions
Mount via IM B5 flange; avoid mechanical shock to the shaft.
Align coupling/gearbox precisely to prevent radial/axial overload.
Use shielded power and encoder cables; ensure EMC grounding.
Maintain ≥50 mm clearance around the motor for natural cooling.
Observe minimum cable bending radius to prevent fatigue.
9. Wiring
Power: U, V, W, PE (3‑phase)
Brake: +24 V DC, 0 V DC
Encoder: EnDat signals, 5 V DC power, shield
10. Safety Instructions
Disconnect all power before wiring or maintenance.
Wait 5 minutes after power‑off for capacitors to discharge.
Do not run the motor at no load for extended periods.
Do not disassemble the encoder or brake.
Ensure reliable protective earth (PE) connection.
11. Maintenance
Routine: Check cable tightness, insulation, and running noise.
Periodic: Verify brake operation and encoder signal quality.
Cleaning: Keep motor surface free of dust and debris.
12. Troubleshooting
No rotation: Check power wiring, brake release signal, drive enable.
Position deviation: Check encoder cable and EnDat communication.
Overheat: Check overload, blocked ventilation, or bearing wear.
Brake not releasing: Check 24 V DC supply and wiring.
Get a Quote